槽式太陽(yáng)能熱發(fā)電是目前國(guó)際上發(fā)電規(guī)模最大,且已經(jīng)實(shí)現(xiàn)商業(yè)化的,較為理想的太陽(yáng)能熱發(fā)電技術(shù)。槽式太陽(yáng)能跟蹤控制系統(tǒng),本質(zhì)上屬于單軸跟蹤系統(tǒng),相對(duì)于塔式和蝶式跟蹤控制系統(tǒng),相對(duì)簡(jiǎn)單一些。本文根據(jù)常見(jiàn)的槽式驅(qū)動(dòng)機(jī)構(gòu)的不同,對(duì)槽式支架跟蹤控制系統(tǒng)做一個(gè)簡(jiǎn)單的概述。
基于液壓缸驅(qū)動(dòng)的槽式定日鏡支架跟蹤控制系統(tǒng)

圖1:槽式液壓驅(qū)動(dòng)定日鏡驅(qū)動(dòng)機(jī)構(gòu)示意圖
該機(jī)械機(jī)構(gòu),由追蹤油缸、平衡閥、蓄能器、泵站(一般由電機(jī)和4個(gè)液壓閥組成)等構(gòu)成。控制系統(tǒng)控制兩個(gè)油缸來(lái)驅(qū)動(dòng)定日鏡旋轉(zhuǎn)到追蹤的位置。該裝置被成功的應(yīng)用于國(guó)外的槽式電站中。一般都是南北向來(lái)進(jìn)行安裝。
國(guó)內(nèi)對(duì)該結(jié)構(gòu)的驅(qū)動(dòng)和控制系統(tǒng)的研究也比較深入,已經(jīng)實(shí)現(xiàn)了較為成熟的控制方案。常規(guī)的控制方案是:用傾角傳感器或者旋轉(zhuǎn)編碼器來(lái)對(duì)機(jī)械結(jié)構(gòu)進(jìn)行定位,得知定日鏡當(dāng)前所處的角度,同時(shí)根據(jù)天文算法算出機(jī)械結(jié)構(gòu)理論上的角度,當(dāng)兩個(gè)角度存在偏差時(shí),驅(qū)動(dòng)2個(gè)油缸的運(yùn)動(dòng),使定日鏡旋轉(zhuǎn)到理想的位置。
控制上的難點(diǎn):
1)定日鏡機(jī)械支架當(dāng)前角度的精準(zhǔn)測(cè)量。機(jī)械結(jié)構(gòu)當(dāng)前角度的測(cè)量一般都是由傳感器來(lái)實(shí)現(xiàn)的。當(dāng)機(jī)械結(jié)構(gòu)的旋轉(zhuǎn)機(jī)構(gòu)存在震動(dòng)或者由于外力(比如風(fēng)力忽大忽小)等的影響,傳感器的輸出會(huì)存在一個(gè)跳變,或者輸出信號(hào)中會(huì)一直疊加一個(gè)干擾的波形,如果控制器的魯棒性不強(qiáng),很容易會(huì)誤動(dòng)作。
2)驅(qū)動(dòng)油缸的切換。該機(jī)構(gòu)屬于斷續(xù)跟蹤的形式,在該機(jī)構(gòu)正常的追蹤過(guò)程中,會(huì)存在兩個(gè)油缸的切換,兩個(gè)油缸可能同時(shí)推,同時(shí)拉,一個(gè)推一個(gè)拉。如果切換不及時(shí)或者不準(zhǔn)確,很容易導(dǎo)致機(jī)械結(jié)構(gòu)的損壞。一般控制廠家都會(huì)做大量的測(cè)試,根據(jù)機(jī)械結(jié)構(gòu)的不同,設(shè)置不同的換向死區(qū)點(diǎn),來(lái)達(dá)到精確控制的目的。
基于電機(jī)驅(qū)動(dòng)的槽式定日鏡支架控制系統(tǒng)
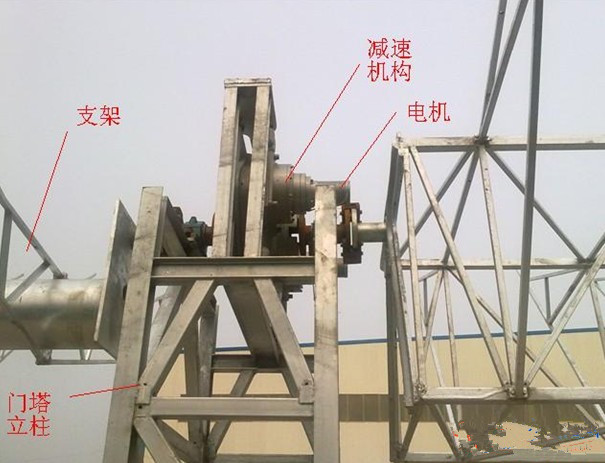
圖2:槽式電機(jī)驅(qū)動(dòng)定日鏡機(jī)構(gòu)示意圖
該機(jī)械機(jī)構(gòu),由驅(qū)動(dòng)電機(jī)(交流電機(jī)、伺服電機(jī)或者步進(jìn)電機(jī),不同廠商不同)、減速機(jī)、聯(lián)軸器、驅(qū)動(dòng)支架等構(gòu)成。控制系統(tǒng)控制電機(jī)的正轉(zhuǎn)和反轉(zhuǎn)來(lái)驅(qū)動(dòng)定日鏡旋轉(zhuǎn)到追蹤的位置。該裝置為了實(shí)現(xiàn)較精準(zhǔn)的控制,一般會(huì)配有角度傳感器或者追日傳感器以實(shí)現(xiàn)閉環(huán)的控制。
該控制方案如果采用普通的電機(jī),則需要不斷的控制電機(jī)的啟停,啟停過(guò)程中,電機(jī)會(huì)隨著載荷的不同而呈現(xiàn)出不同的運(yùn)行軌跡。對(duì)于較高精度不大現(xiàn)實(shí)。如果采用步進(jìn)電機(jī)或者伺服電機(jī),可以實(shí)現(xiàn)精確的控制,但是成本上會(huì)稍微高一些。
兩種槽式跟蹤控制系統(tǒng)的比較
相比液壓的控制方式,電機(jī)的驅(qū)動(dòng)載荷能力弱一些;但是電機(jī)的驅(qū)動(dòng)方案會(huì)大大降低由于液壓中兩個(gè)油缸的配合不好導(dǎo)致機(jī)械出現(xiàn)故障的概率。同時(shí),如果采用步進(jìn)電機(jī)或者伺服電機(jī)驅(qū)動(dòng)可以實(shí)現(xiàn)連續(xù)跟蹤。眾所周知,連續(xù)跟蹤會(huì)比斷續(xù)跟蹤的效果好。總之,不論采用哪種結(jié)構(gòu)形式,從控制策略上來(lái)講,閉環(huán)控制比開(kāi)環(huán)控制要好,實(shí)時(shí)修正比定時(shí)修正要好。
本文對(duì)常見(jiàn)的槽式驅(qū)動(dòng)控制系統(tǒng),做了簡(jiǎn)單的概述。當(dāng)前,還存在其他的一些結(jié)構(gòu),比如極軸式槽式跟蹤系統(tǒng)等;就控制系統(tǒng)而言也各有特點(diǎn),在此就不再贅述了。
本文轉(zhuǎn)載于光熱發(fā)電網(wǎng)














